LSTM 모델
1. RNN 모델의 문제점
- 기울기 폭발, 소실 문제는 왜 발생하는가?
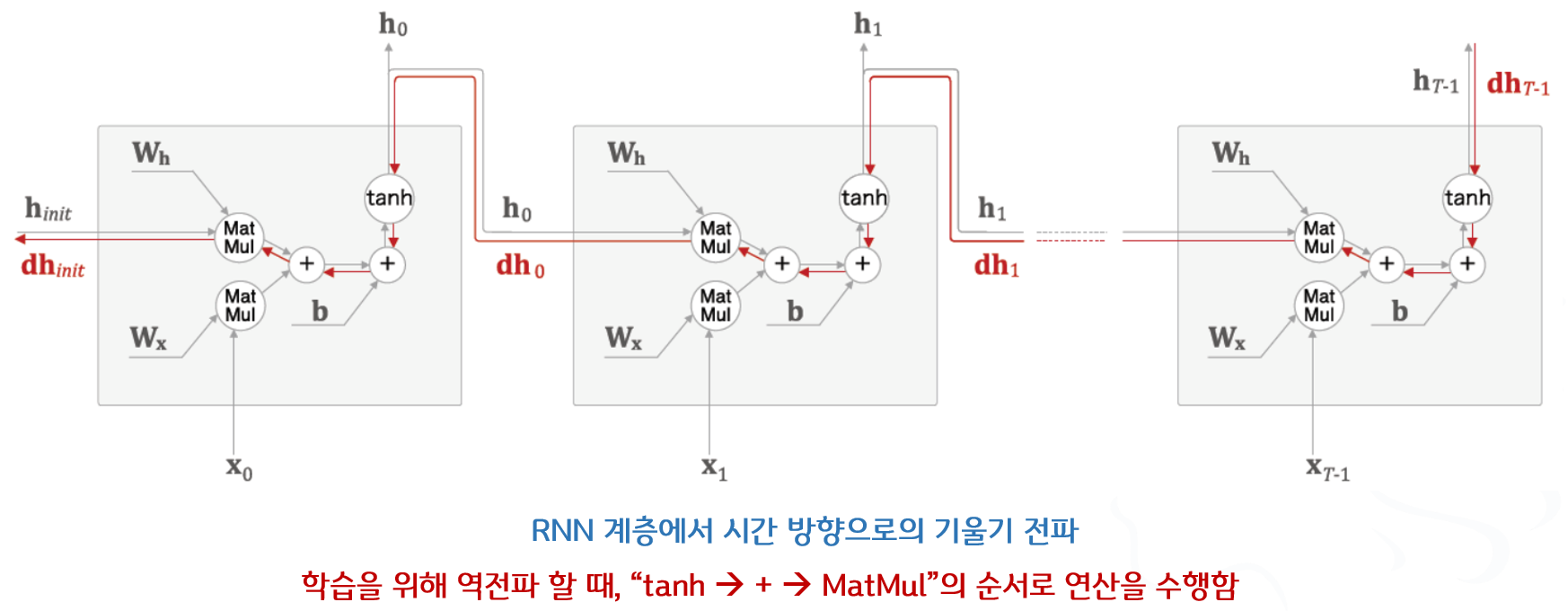
- 역전파 할 때, “tanh 🡲 + 🡲 MatMul”의 순서로 연산을 수행함
- “+” : 그냥 기울기의 정보를 전달할 뿐 기울기의 크기가 바뀌지 않음
- “tanh” : 역전파 할 때, 미분 연산을 수행함
- \(y = tanh(x)\)일 때의 미분은 \(\frac{\partial y}{\partial x} = 1 - y^2\)
🡲 각각 그래프를 그려보면
🡲 값의 범위는 1.0 이하
🡲 x가 0에서 멀어질수록 작아짐
🡲 역전파를 반복할수록(=tanh함수를 지나칠수록) 계속 작아짐
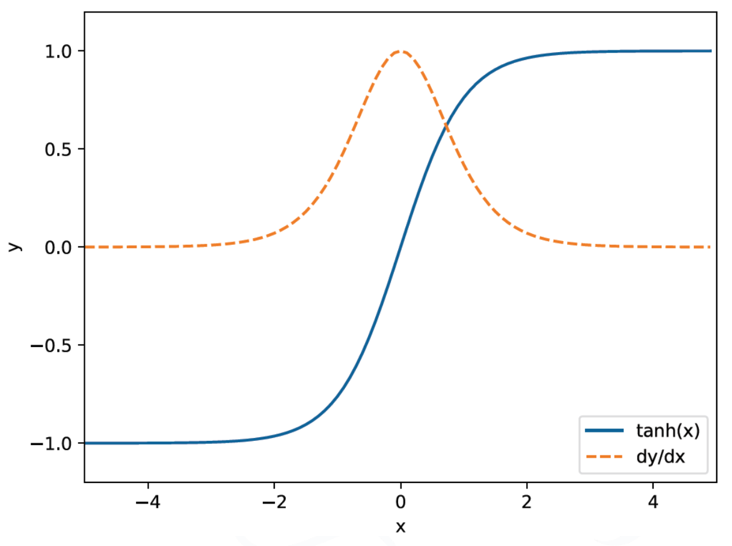
- \(y = tanh(x)\)일 때의 미분은 \(\frac{\partial y}{\partial x} = 1 - y^2\)
“MatMul” : tanh(x) 를 무시하고 “MatMul”만 집중해서 보면..
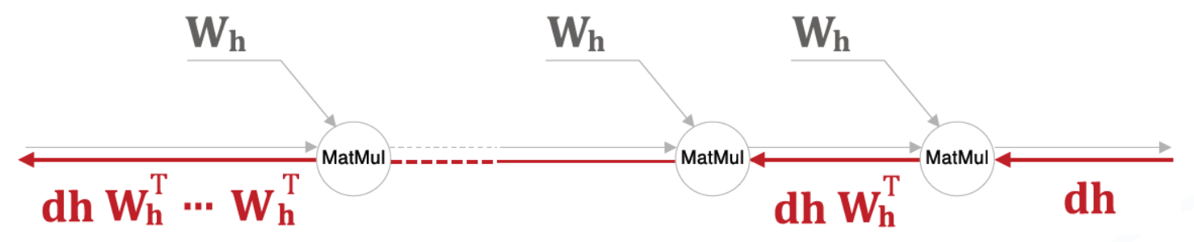
몇 번을 반복하더라도 가중치 \(W_h\)는 역전파를 지나는 도중에 변하지 않고 계속 그대로 사용됨
🡲 반복적으로 곱해질 경우의 그래프를 그려보면 🡲 지수증가 🡲 기울기 폭발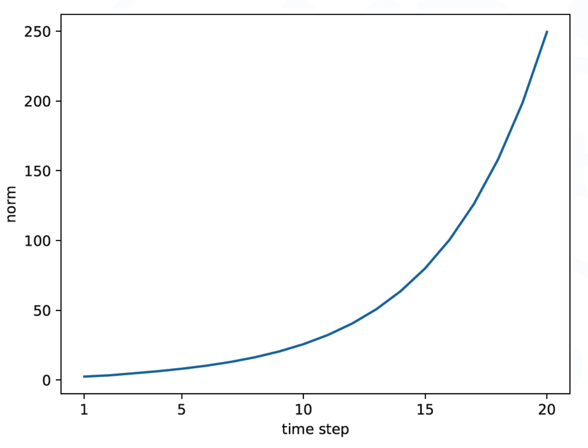
\(W_h\)의 초기 값을 절반으로 줄여서 다시 반복시켜보면 🡲 지수감소 🡲 기울기 소실
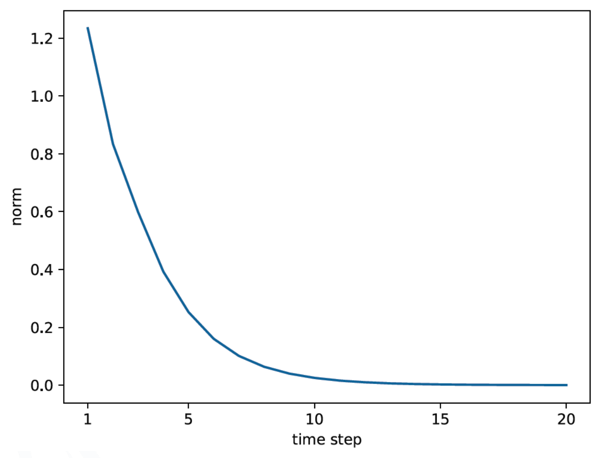
- \(W_h\)가 스칼라 값이면 \(W_h > 1\) 이면 지수증가, \(W_h < 1\)이면 지수감소 하게 됨
- \(W_h\)가 행렬이면 “특잇값”에 따라 지수증가/감소가 결정됨
- 행렬의 특잇값: 데이터가 얼마나 퍼져있는지(분포)에 따라 변화
- 기울기 폭발의 대책
- 기울기 클리핑(Gradients Clipping)
- 신경망에서 사용되는 모든 매개변수에 대한 기울기를 하나로 처리한다고 가정함 ( \(\hat{g}\)으로 표시 )
- 기울기의 L2-Norm이 임계값(Threshold)을 초과하면 두 번째 줄의 수식과 같이 기울기를 수정
- 간단한 알고리즘이지만 많은 경우에 잘 작동함
- 기울기 클리핑(Gradients Clipping)
- 기울기 소실의 대책
- 간단한 방법으로는 대책을 찾을 수 없음(RNN 모델의 근본부터 뜯어고쳐야..)
- “기울기 소실이 일어나지 않도록 그 값을 직접 제어해 주겠다”라는 아이디어
🡲 제어를 위한 Gate를 추가
🡲 다양한 알고리즘이 등장했으며 그 중 대표적인 알고리즘이 LSTM, GRU
2. LSTM 모델
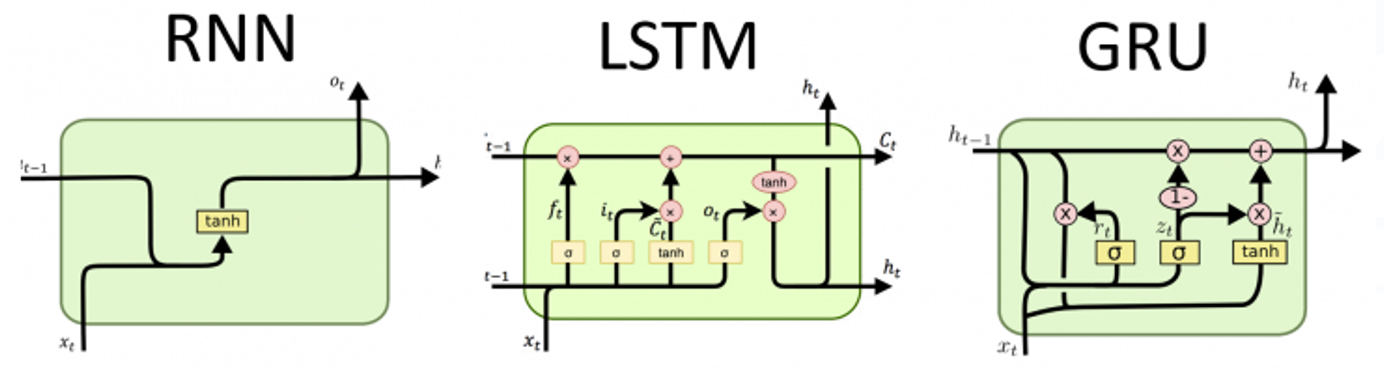
RNN과 LSTM의 구조 비교
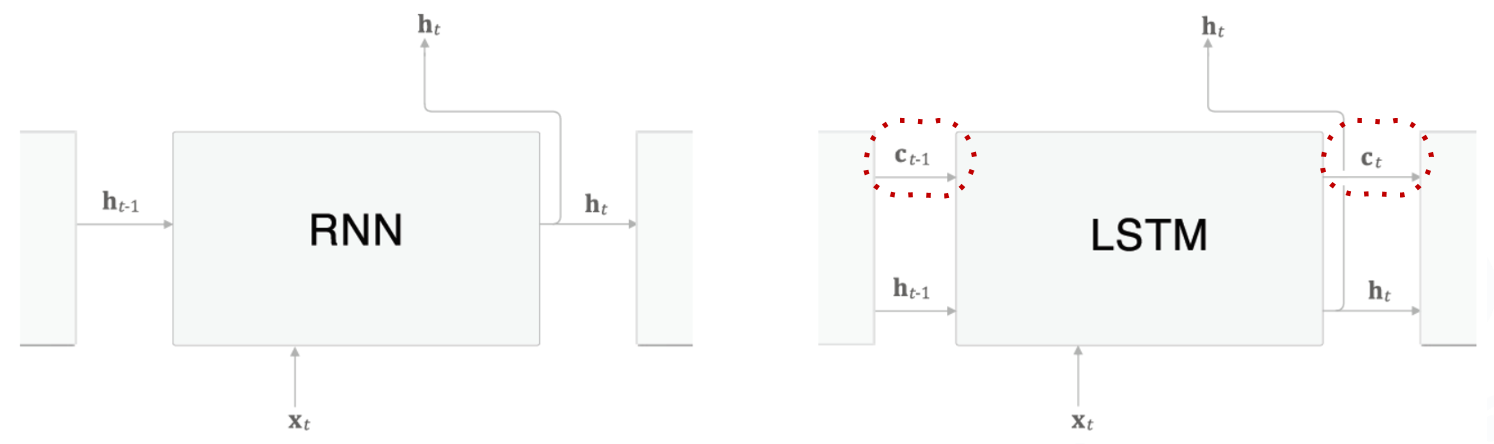
- LSTM 계층의 인터페이스에는 c 라는 경로가 있다!
- c : Cell 또는 Memory Cell
- LSTM 계층의 인터페이스에는 c 라는 경로가 있다!
- Memory Cell의 특징
- 데이터를 자기 자신으로만(LSTM 계층 내에서만) 주고 받음 🡲 LSTM 계층 내에서만 완결되고, 다른 계층으로는 출력하지 않음
- Memory Cell \(c_t\) 에는 시각 t 에서의 LSTM의 기억을 저장함
- 과거로부터 시각 t 까지에 필요한 모든 정보가 저장되어 있다고 가정함
- 또는 그렇게 저장되도록 학습 수행 🡲 \(c_t\)의 정보가 지속적으로 갱신되고 있음을 의미
- 그리고 \(c_t\) 의 정보를 바탕으로 외부 계층과 다음 시각의 LSTM 계층에 h_t 를 계산하여 출력함
- Memory Cell은 어떤 값을 계산하는가?
- \(c_t\)는 3개의 입력 \(({c_t}−1, {h_t}−1, x)\)로 부터 어떤 계산을 수행함 🡲 \(h_t\)는 \(c_t\)의 영형을 받는다는 의미
- 출력되는 은닉상태 \(h_t = tanh(c_t)\) 🡲 \(c_t\)의 각 요소에 tanh를 적용함을 의미
- 은닉상태 \(h_t\)는 단순히 \(c_t\)에 tanh를 적용한 것 뿐 🡲 \(c_t\)와 \(h_t\)를 구성하는 원소의 수는 같음
- Memory Cell은 무엇으로부터 제어를 받는가?
- 3개의 Gate와 1개의 Updater의 제어를 받음
- Output Gate
- Forget Gate
- Input Gate
- Updater → New Memory Cell
- Gate: 데이터의 흐름을 제어함. 열기/닫기 및 어느 정도 열지를 조절(열림 상태 조절)
- 3개의 Gate와 1개의 Updater의 제어를 받음
- Output Gate
- tanh(ct)의 각 원소에 대하여 “그것이 다음 시각의 은닉상태에 얼마나 중요한가?”를 조정
- 다음 은닉상태 \(h_t\)의 출력을 담당하므로 Output Gate라고 부름
- Output Gate의 열림 상태는 입력 \(x_t\)와 이전 상태 \(h_t−1\)로부터 구함
\[o=\sigma({x_t}{W_x}^{(o)}+{h_{t-1}}{W_x}^{(o)}+b^{(o)})\] \[{h_t}=o⊙tanh(c_t)\]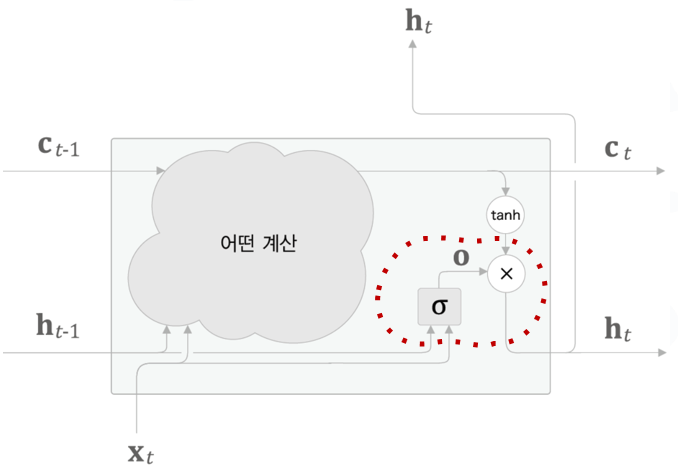
- \(⊙\) 연산자
- 수학 및 선형대수학에서 아다마르 곱(Hadamard product) 또는 요소별 곱(Element-wise product)을 의미
- 같은 크기의 두 행렬 \((A, B)\)에서 대응하는 성분끼리 곱하는 연산
- Forget Gate
- \(c_{t−1}\)의 기억 중에서 불필요한 “기억의 어떤 것을 잊을까?”를 명확하게 지시하는 Gate
- LSTM 계층에 Forget Gate를 추가하면..
\[f=\sigma({x_t}{W_x}^{(f)}+{h_{t-1}}{W_x}^{(f)}+b^{(f)})\]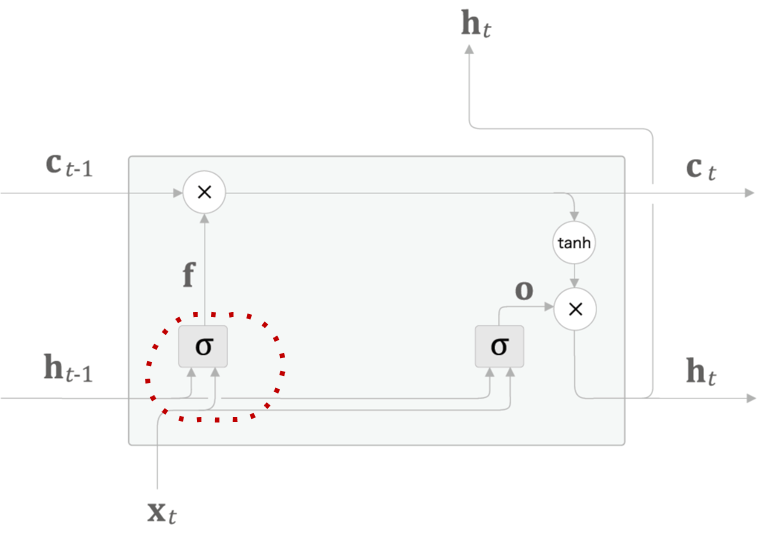
- 새로운 Memory Cell
- 잊어야 할 기억은 삭제되었는데 새로운 기억은?
- 새로운 기억을 Memory Cell에 추가하기 위해서 \(tanh\) 노드 추가
\[g=tanh({x_t}{W_x}^{(g)}+{h_{t-1}}{W_x}^{(g)}+b^{(g)})\]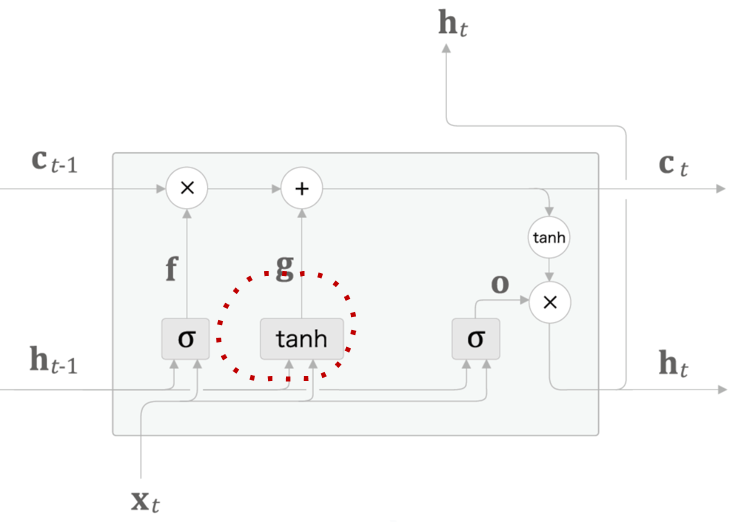
- Input Gate
- g에 Gate를 하나 추가함 → 입력 게이트(input gate)
- g의 각 원소가 새로 추가되는 정보로서의 가치가 얼마나 큰지를 판단
- 새 정보를 무작정 받는 것이 아니라 적절히 취사선택하는 것이 Input Gate의 역할
\[i=tanh({x_t}{W_x}^{(i)}+{h_{t-1}}{W_x}^{(i)}+b^{(i)})\]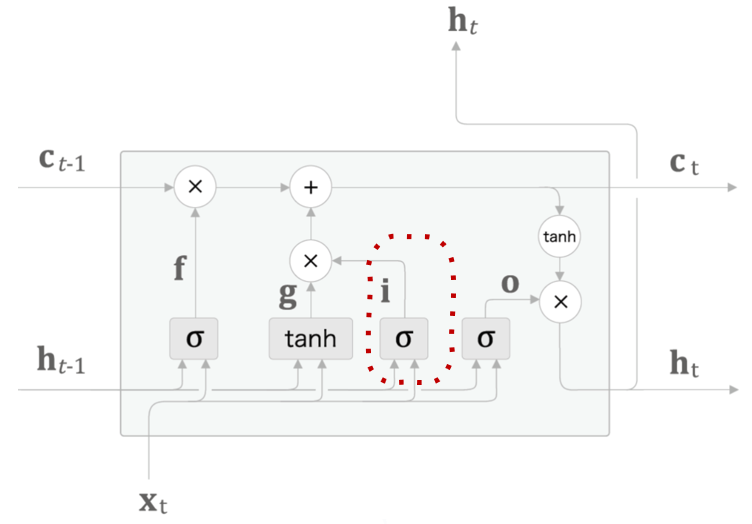
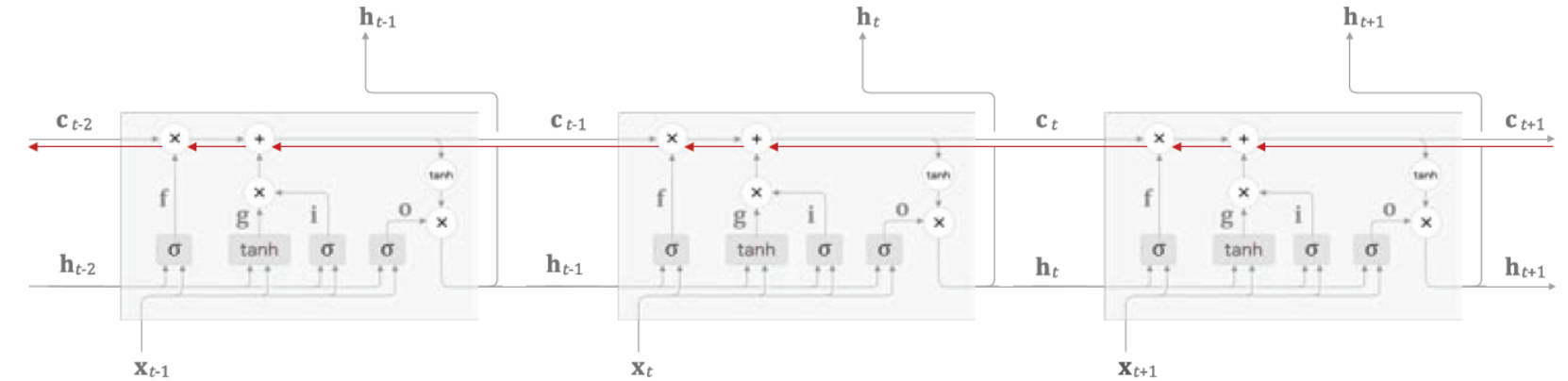
- 어떻게 해서 Gate들과 새로운 Memory Cell이 기울기 소실을 해결하는가?
- Memory Cell “c”의 역전파에 주목해보면 🡲 ‘+’와 ‘x’ 노드 만을 지나게 됨
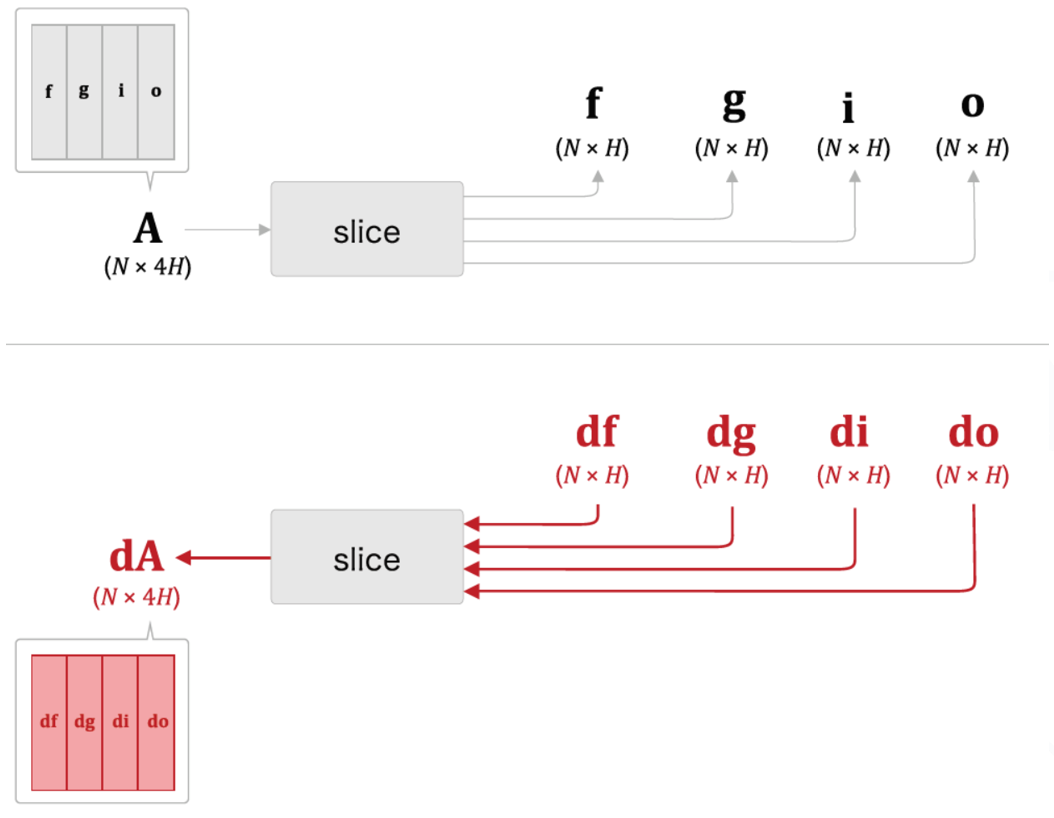
- 연산 내용 종합
- 3개의 Gate와 1개의 업데이트 메모리셀로 구성된 4개의 수식을 모아 단 한 번의 아핀변환으로 계산
- 아핀 변환(Affine Transformation)
- 선형 변환(회전, 스케일링, 전단)과 평행 이동을 결합하여, 기하학적 형태의 평행성과 직선을 보존하는 변환
- 방향과 크기 뿐만 아니라 위치를 함께 포함하는 변환
- \(y = Ax + b\) 형태로 표현되며, 영상 처리, 컴퓨터 그래픽스에서 이미지의 위치, 크기, 방향을 변경하거나 왜곡을 보정하는 데 주로 사용
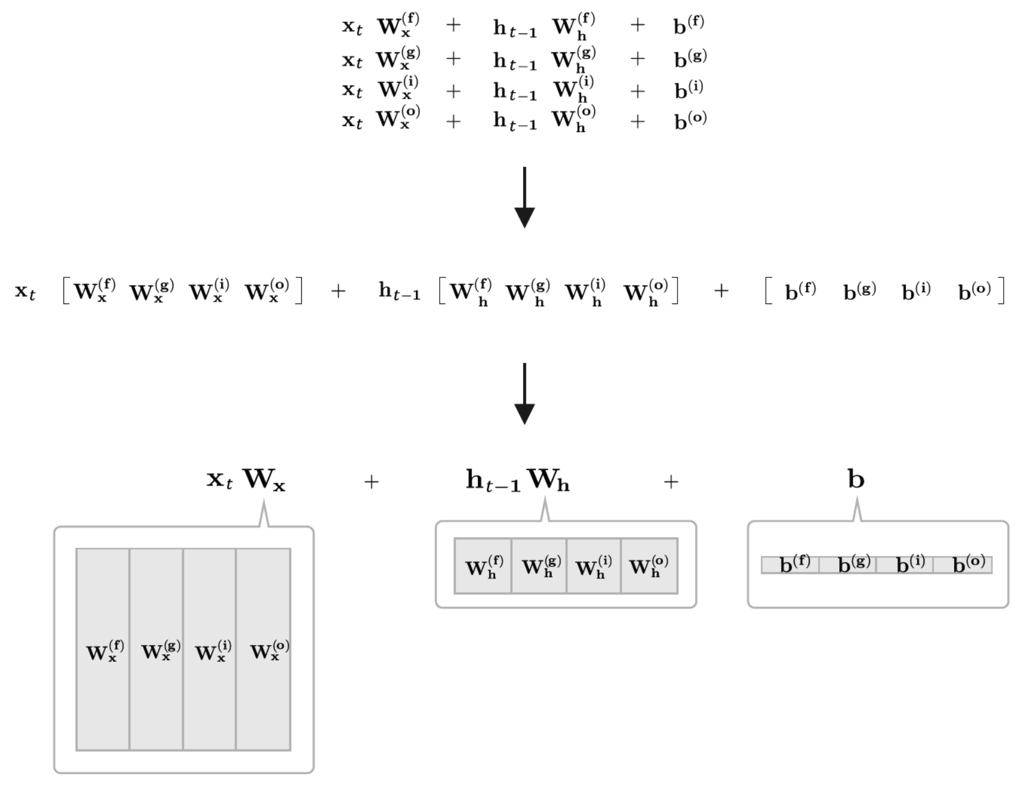
- 아핀 변환(Affine Transformation)
Wx, Wh, b 각각에 4개 분의 가중치(혹은 편향)가 포함되어 있다고 가정하고 Affine 변환을 수행하는 LSTM 계산 그래프
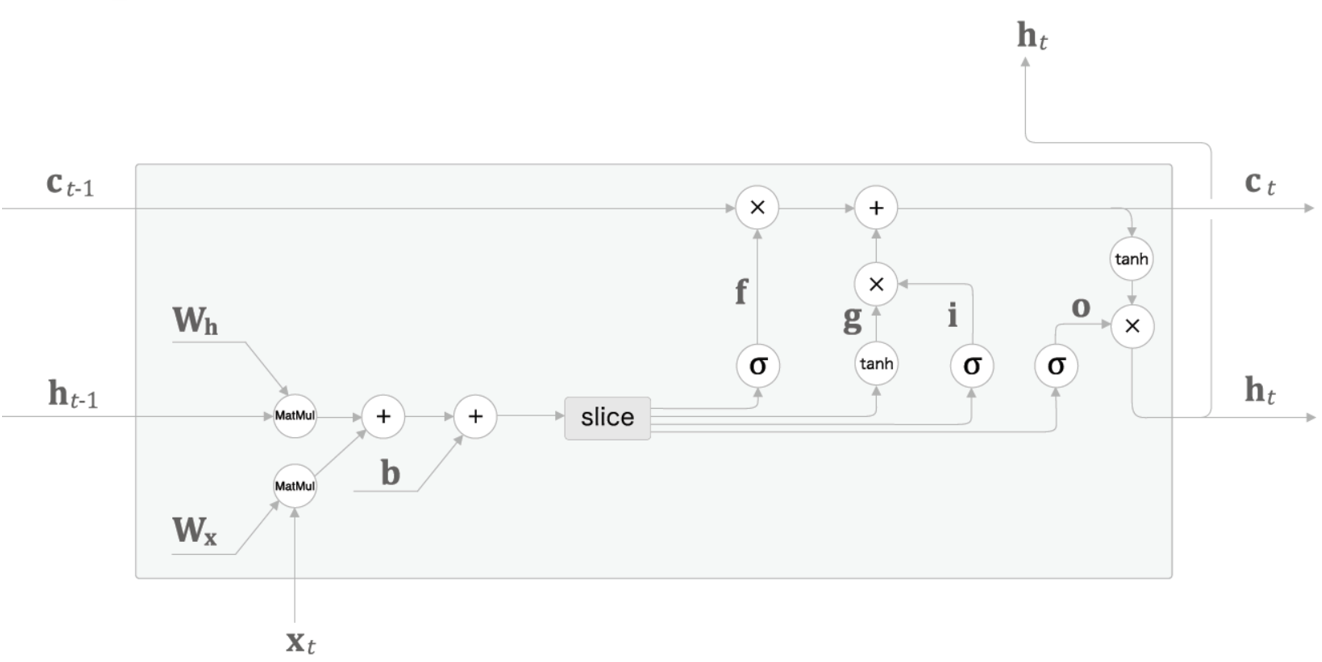
- 3개의 Gate와 1개의 업데이트 메모리셀로 구성된 4개의 수식을 모아 단 한 번의 아핀변환으로 계산
- 동작 원리
- Forget Gate를 통해 이전 특징 별로 기억 여부를 결정
- Input Gate를 통해 현 시점의 정보가 얼마나 중요한지를 반영하여 기록
- 이전 Cell State의 결과와 현 시점의 Forget Gate에서 잊고, Input Gate의 중요도만큼 곱한 값으로 현 시점의 Memory Cell값을 생성
- 현 시점의 Forget Gate, Input Gate에 의해서 변경된 현 시점의 Cell State 값을 얼마만큼 다음 레이어로 전달할지 계산
- GRU
- LSTM에서 불필요한 부분을 제거하는 과정애서 생겨난 아키텍처
- LSTM을 구성하는 Time-Step의 Cell을 조금 더 간소화한 버전
LSTM과 달리 Reset Gate(r)와 Update Gate(z)의 2개의 Gate만 가지고 있음
- 세 모델의 비교