센서의 하드웨어 구조와 원리
- 센서의 하드웨어는 단순히 하나의 칩이 아니라,
- 외부 자극을 수용하고 다듬어 컴퓨터가 이해할 수 있는 언어로 변환하는 ‘신호 처리 체인(Signal Chain)’의 집합체
1. 센서 하드웨어의 표준 4단계 구조
- 모든 센서는 측정 대상에 상관없이 공통적으로 다음과 같은 하드웨어 계층을 가짐
1.1 센싱 소자 (Sensing Element / Transducer)
- 역할
- 물리/화학적 에너지를 전기적 에너지로 바꾸는 1차 변환기
- 하드웨어 구성
- 물리 센서: 멤브레인(압력), 질량체(가속도), 빗질 구조의 전극(정전용량) 등
- 화학/바이오 센서: 효소층, 이온 선택막, 금속 산화물 박막 등
- 원리
- 외부 자극이 가해지면 소자의 저항(\(R\)), 정전용량(\(C\)), 기전력(\(V\)) 중 하나가 변화함
- 내부 메커니즘
- 센싱 소자(Sensing Element)가 물리적 현상을 전기로 바꾸는 방법
- 가속도(\(a\))는 공식에 직접 포함되는 변수가 아니라, 결과적으로 \(d\)나 \(A\)를 변화시키는 ‘원인’
- 가속도(\(a\)) 발생: 외부에서 힘이 가해짐
- 질량체 이동: 내부에 매달린 질량체가 움직임
- 기하학적 변화: 질량체가 움직이면서 고정 전극과의 간격(\(d\))이 좁아지거나, 서로 마주 보는 면적($A$)이 달라짐
- 값의 변화: 이 \(d\)나 \(A\)가 변하면서 최종적으로 정전용량(\(C\))이 바뀌게 됨
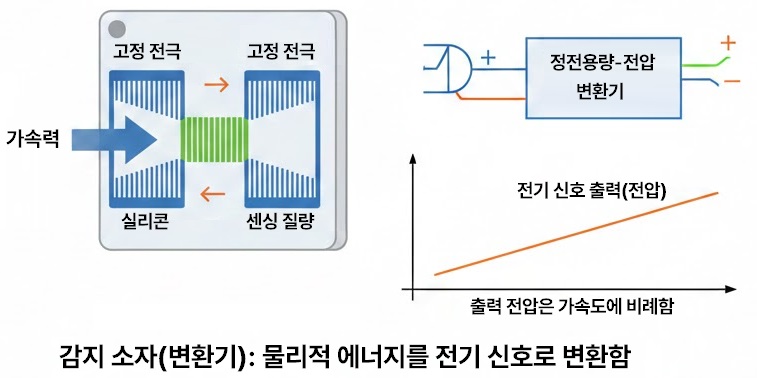
- [1단계] 물리적 변화의 수용: 센싱 매스(Sensing Mass)
- 구조
- 실리콘 기판 위에 아주 미세한 스프링 구조로 매달려 있는 질량체 ➜ Sensing Mass(감지 질량체, 그림 중앙의 초록색 부분)
- 원리
- 외부에서 가속도나 충격(Acceleration Force)이 가해지면 ➜ 관성의 법칙에 따라 이 질량체가 좌우로 움직임
- 의의
- 센싱 소자의 첫 번째 임무는 보이지 않는 ‘힘’을 눈에 보이는 ‘물리적 움직임’으로 치환하는 것
- 구조
- [2단계] 에너지의 변환: 정전용량(Capacitance) 변화
- 구조
- 고정 전극과 질량체 사이의 빗살 무늬 구조가 핵심
- 움직이는 질량체의 전극과 고정된 전극이 서로 맞물려 있음
- 원리
- 질량체가 움직이면 두 전극 사이의 간격(\(d\))이 변함
- 전기적으로 두 전극 사이의 간격이 변하면
- 전기를 저장하는 능력인 정전용량(Capacitance)이 변하게 됨
- 변환 공식
- \(C = \epsilon \frac{A}{d}\), 간격 \(d\)가 좁아지면 정전용량 \(C\)는 커짐
- C: 정전용량(Capacitance)
- \(\epsilon\): 유전율(Dielectric constant). 전극 사이 물질의 특성, 보통 공기
- A: 전극의 단면적(Area). 두 전극판이 서로 마주 보고 있는 유효 면적
- \(d\): 두 전극판 사이의 간격
- \(C = \epsilon \frac{A}{d}\), 간격 \(d\)가 좁아지면 정전용량 \(C\)는 커짐
- 결과
- 이 단계에서 물리적 변위(Movement)가 전기적 특성 변화(Capacitance)로 치환됨
- 구조
- [3단계] 전기 신호의 출력: C-to-V 변환
- 역할
- 그림 우측 상단의 정전용량-전압 변환기 블록의 역할
- 변해버린 정전용량 값은 그 자체로는 컴퓨터가 읽을 수 없음
- 이를 우리가 흔히 아는 전압(Voltage) 신호로 다시 한번 변환
- 그림 우측 상단의 정전용량-전압 변환기 블록의 역할
- 그래프 해석
- 우측 하단의 그래프를 보면, 가속도가 커질수록 출력되는 전압이 선형적으로 높아지는 것을 볼 수 있음
- 최종 결과
- 시스템은 “전압이 2.5V니까 현재 가속도는 \(5m/s^{2}\) 이구나!”라고 판단할 수 있게 됨
- 역할
- 센싱 소자는 ‘물리적 자극 → 기계적 변위 → 전기적 특성 변화’라는 3단계를 거치는 트랜스듀서(Transducer)
- 그림에서 질량체가 움직이고 전극 사이의 간격이 변하는 과정이 바로 ‘기계가 세상을 느끼는 방식’
1.2 아날로그 프론트엔드 (AFE: Analog Front-End)
- 역할
- 소자에서 나온 아주 미세하고 거친 신호를 깨끗하게 가공
- 핵심 회로
- 증폭기(Amplifier)
- 단위의 작은 신호를 시스템이 인식할 수 있는 전압 레벨로 증폭
- 필터(Filter)
- 주변 전자기기나 진동에서 오는 노이즈(Noise)를 차단
- 증폭기(Amplifier)
- 내부 메커니즘
- 센서 소자에서 나온 ‘가공되지 않은 거친 신호(Raw Signal)’가 어떻게 컴퓨터가 이해할 수 있는 ‘깨끗한 디지털 데이터’로 변형되는가?
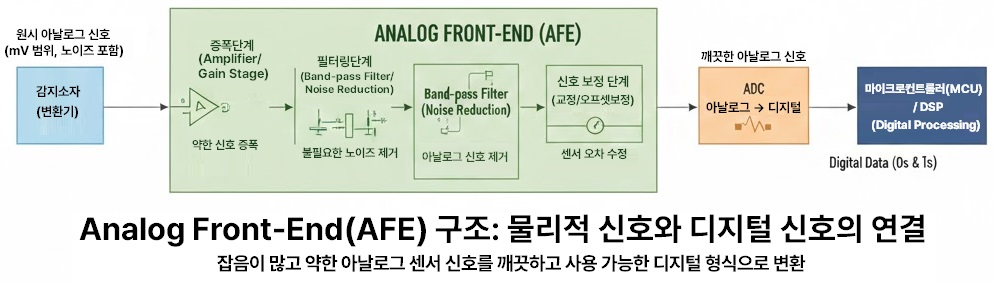
- [1단계] 증폭 단계 (Amplifier / Gain Stage)
그림의 가장 왼쪽에 있는 삼각형 블록
- 왜 필요한가?
- 센싱 소자에서 갓 나온 신호는 보통 나 단위로 매우 미약함
- 이 상태로는 뒤에 있는 ADC가 값을 제대로 읽을 수 없음
- 역할
- 약한 신호를 일정한 비율(Gain)로 뻥튀기하여 시스템이 처리하기 적절한 전압 수준으로 증폭
- 비유
- 속삭이는 소리를 마이크와 앰프를 통해 큰 목소리로 확성하는 것과 같음
- [2단계] 필터링 단계 (Band-pass Filter / Noise Reduction)
증폭기 뒤에 이어지는 회로 부품들(저항과 커패시터 기호) 블록
- 왜 필요한가?
- 신호를 증폭할 때 주변의 전기적 잡음(전자기파, 진동 등)도 함께 커짐
- 역할
- 우리가 원하는 주파수 대역의 신호만 통과
- 불필요한 고주파 잡음이나 저주파 흔들림 차단
- 효과
- “지직”거리는 노이즈 제거
- 신호의 순도(SNR: 신호 대 잡음비) 향상
- [3단계] 신호 보정 단계 (Calibration / Offset Correction)
시계 바늘 모양의 기호가 있는 블록
- 왜 필요한가?
- 모든 센서는 제조 공정상 미세한 오차가 있음
- 아무런 자극이 없는데도 0이 아닌 값이 출력되는 ‘오프셋(Offset)’ 현상이 대표적
- 모든 센서는 제조 공정상 미세한 오차가 있음
- 역할
- 하드웨어적으로 기준점을 0으로 맞추거나
- 온도 등에 의한 왜곡을 실시간으로 보정
- 의의
- 데이터의 ‘정확도(Accuracy)’를 확보하는 마지막 아날로그 공정
- [4단계] 디지털 변환 관문 (ADC: Analog-to-Digital Converter)
AFE의 결과물을 받아들이는 주황색 블록입니다.
- 역할
- AFE를 거쳐 깨끗해진 아날로그 전압 신호를 0과 1의 조합인 디지털 코드로 변환
- 결과
- 이 단계를 거쳐야 비로소 우측의 Microcontroller(MCU)가 데이터를 계산하고 판단할 수 있게 됨
- AFE를 한 마디로 정의한다면 “신호 청정기”
- “센싱 소자가 세상을 ‘느끼는’ 역할이라면, AFE는 그 느낌을 오해 없이 전달하기 위해 다듬는 역할
- 필터가 없으면 노이즈 때문에 데이터가 튀고, 증폭기가 없으면 데이터가 너무 작아 보이지 않게 됨
1.3 데이터 변환부 (ADC: Analog-to-Digital Converter)
- ADC(Analog-to-Digital Converter)
- 아날로그 신호라는 ‘연속적인 흐름’을 디지털 데이터라는 ‘끊어진 숫자’로 바꾸는 변환기
- 연속적인 아날로그 전압 신호를 0과 1로 이루어진 디지털 코드로 변환
- 아날로그 신호라는 ‘연속적인 흐름’을 디지털 데이터라는 ‘끊어진 숫자’로 바꾸는 변환기
- 원리
- 샘플링(시간 분할)과 양자화(값 분할) 과정을 거쳐 물리량을 숫자로 바꿈
내부 메커니즘
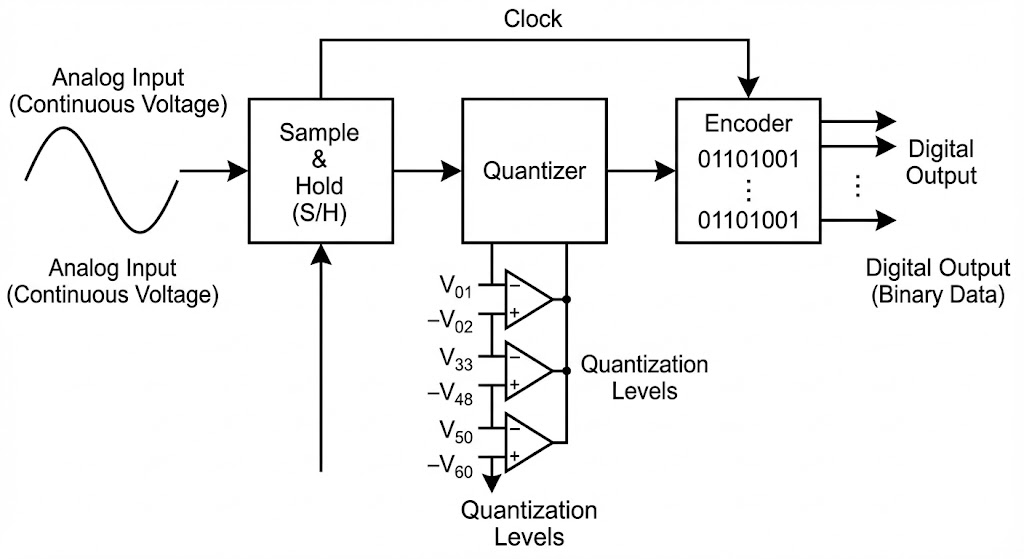
- [1단계] 표본화 및 유지 (Sample & Hold, S/H)
그림 가장 왼쪽의 Sample & Hold 블록
- 동작:
- 물결처럼 출렁이는 Analog Input(연속 전압)을
- 일정한 시간 간격(Clock)마다 스냅샷을 찍듯 포착하여
- 그 값을 잠시 붙잡아둠
- 왜 필요한가?:
- 아날로그 값은 계속 변하기 때문에
- 다음 단계에서 값을 측정하는 동안 전압이 바뀌지 않도록
- ‘정지 화면’ 상태로 유지해야 정확한 측정이 가능함
- 핵심 지표:
- 얼마나 자주 찍느냐가 바로 샘플링 속도(Sampling Rate, Hz)
- [2단계] 양자화 (Quantizer)
그림 중앙의 Quantizer와 비교기(\(V_{01}, V_{02}\) 등) 블록
- 동작:
- 잡고 있는 전압 값을 미리 정해진 눈금(Quantization Levels) 중 가장 가까운 수치에 끼워 맞춤
- 원리:
- 그림 하단의 삼각형 모양 기호: 비교기
- 입력된 전압을 기준 전압($V$)들과 비교하여 어떤 눈금에 해당하는지 결정
- 비유:
- 키를 잴 때 소수점까지 재지 않고 1cm 단위 눈금 중 가장 가까운 곳에 맞추는 것과 같음
- 이 눈금이 촘촘할수록 원래 신호에 가까워짐 ➜ 분해능(Resolution, bit)
- [3단계] 부호화 (Encoder)
그림 오른쪽의 Encoder 블록
- 동작:
- 양자화된 눈금 번호를 컴퓨터가 이해할 수 있는 0과 1의 조합(Binary Data)으로 최종 변환
- 결과:
- 그림에 적힌 01101001 같은 이진수 데이터가 되어 MCU나 컴퓨터로 전송됨
- 의의:
- 이 단계를 거치면 물리적인 ‘전압’은 사라지고
- 순수한 ‘정보’인 디지털 데이터만 남게 됨
- [1단계] 표본화 및 유지 (Sample & Hold, S/H)
- 아날로그 신호가 매끄러운 경사로라면, 디지털 신호는 계단
- ADC는 경사로 위를 걷는 사람의 높이를 매 순간 측정해서 ‘몇 번째 계단에 있는지’ 숫자로 기록하는 장치
- Clock이 빨라질수록(표본화), Quantization Levels가 촘촘해질수록(양자화), 원래의 경사로(아날로그 신호)를 더 완벽하게 복원할 수 있음
1.4 디지털 로직 및 인터페이스 (Digital Logic & Interface)
- 역할
- 변환된 데이터를 정렬하고,
- 외부 MCU(아두이노, 라즈베리 파이 등)와 통신
- 통신 방식
- I2C, SPI, UART 등 표준 프로토콜을 사용하여 데이터 전송
- 내부 메커니즘
- 그림은 ADC가 내뱉은 0과 1의 나열(Raw Bits)을 어떻게 체계적으로 정리하고, 외부의 호스트(MCU, PC 등)와 대화할 수 있는 ‘언어’로 바꾸는지 보여주는 통신 허브의 구조
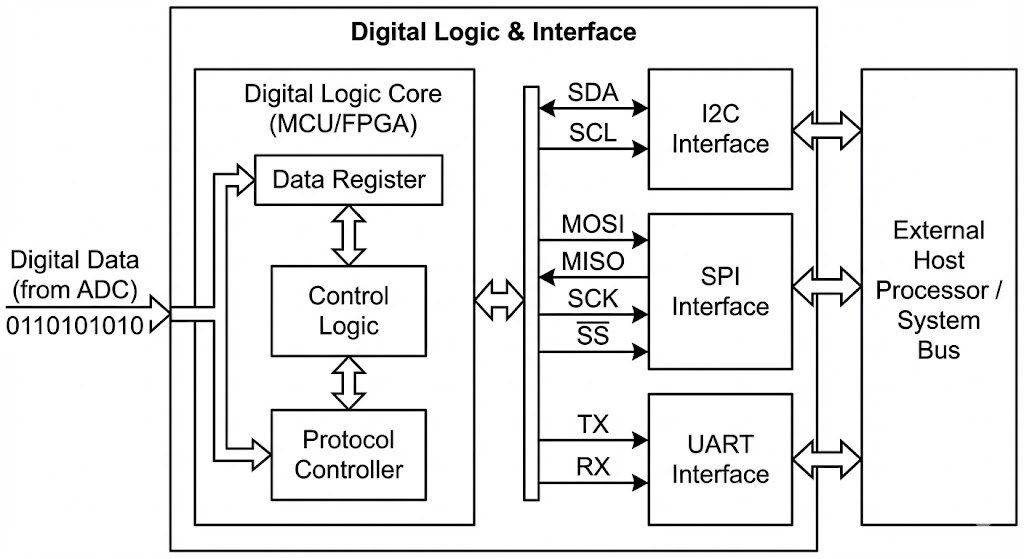
- 디지털 로직 코어 (The Internal Brain)
ADC에서 넘어온 0110… 형태의 데이터를 내부적으로 관리하는 공간
- 데이터 레지스터 (Data Register):
- ADC에서 변환된 최신 측정값을 임시로 보관하는 *‘사물함’
- 외부 호스트가 데이터를 요청할 때까지 이곳에 안전하게 저장
- 제어 로직 (Control Logic):
- 센서의 전반적인 운영을 담당하는 ‘지휘자’
- 센서를 잠재울지(Power-down), 얼마나 자주 측정할지(Sampling Rate) 등을 결정
- 프로토콜 컨트롤러 (Protocol Controller):
- 보관된 데이터를 I2C나 SPI 같은 특정 통신 규약에 맞게 포장하는 ‘번역기’ 역할
- 통신 인터페이스 (The Communication Channels)
- 그림 우측에 나열된 통신 방식들: 센서가 외부와 소통하는 ‘입과 귀’
인터페이스 연결 핀 (그림 참조) 특징 및 실무 활용 I2C SDA(데이터), SCL(클럭) ● 2가닥의 선으로 여러 센서를 연결할 수 있어 배선이 간편함
● 속도는 보통(스마트폰 내부 센서 등)SPI MOSI, MISO, SCK, SS ● 4가닥 이상의 선을 사용하며 속도가 매우 빠름
● 대용량 데이터나 고속 응답이 필요한 센서에 사용UART TX(송신), RX(수신) ● 클럭 신호가 없는 비동기 방식
● PC와 직접 연결하거나 단순한 통신에 주로 활용 - 외부 호스트와의 연결 (External Host Processor)
- 그림 가장 오른쪽의 External Host ➜ 라즈베리 파이, 아두이노, 스마트 팩토리의 PLC 등을 의미
- 이 인터페이스 덕분에 개발자는 센서 내부의 복잡한 물리 현상을 몰라도,
- 코드 한 줄(read_sensor())로 정밀한 측정값을 디지털 숫자로 받아볼 수 있게 됨
- ADC가 만든 데이터가 ‘편지 내용’이라면, 데이터 레지스터는 편지함이고, 프로토콜 인터페이스는 편지를 보낼 ‘우편 규격(등기, 일반, 퀵서비스)’
- 호스트(MCU)는 우체국에 들러 규격에 맞게 포장된 편지를 받아가기만 하면 됨
2. 주요 하드웨어 동작 원리 (변환 메커니즘)
- 하드웨어가 물리량을 전기 신호로 바꾸는 대표적인 메커니즘 3가지
- 센서가 물리적 자극을 만났을 때 내부에서 일어나는 일을 보여줌
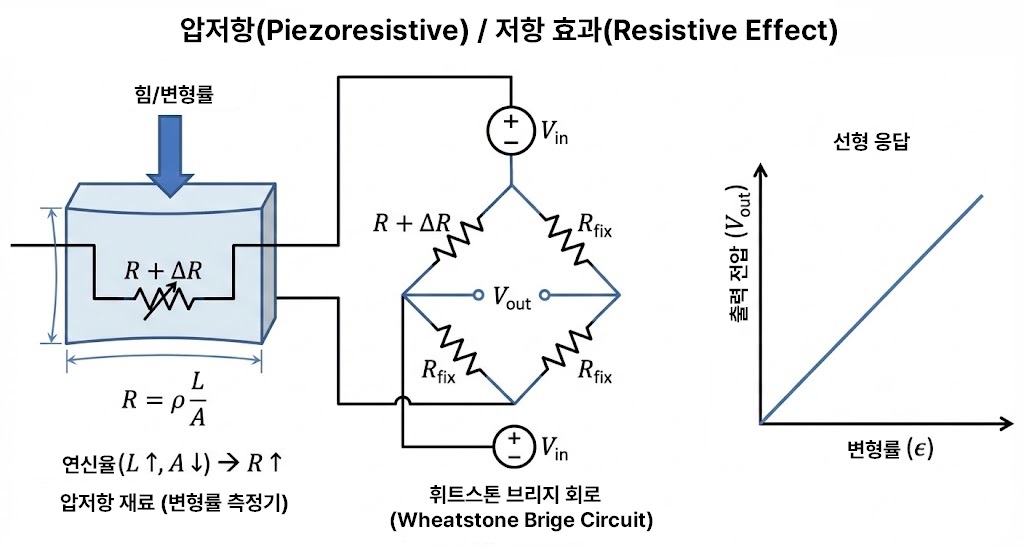
2.1 저항 변화 원리 (Piezoresistive / Resistive)
- 원리
- 힘을 가해 소자가 늘어나거나(스트레인 게이지), 온도가 변해 분자 운동이 바뀌면(서미스터) 전기 저항이 변하는 성질을 이용
- 도체의 저항 공식인 \(R = \rho \frac{L}{A}\) (\(\rho\): 비저항, \(L\): 길이, \(A\): 단면적)를 따름
- 힘을 가해 \(L\)이 늘어나고 \(A\)가 줄어들면 \(R\)이 커짐
- 힘을 가해 소자가 늘어나거나(스트레인 게이지), 온도가 변해 분자 운동이 바뀌면(서미스터) 전기 저항이 변하는 성질을 이용
- 프로세스
- 외부 자극(압력, 인장, 온도) 발생
- 센싱 소자(금속선, 반도체 박막 등)의 물리적 변형 또는 물성 변화
- 소자의 전기 저항값 변화
- 휘트스톤 브리지(Wheatstone Bridge) 회로를 통해 전압 변화로 출력
- 특징
- 회로 구성이 비교적 간단하고 저렴함
- 정적 상태(변하지 않는 압력 등) 측정에 유리함
- 주의사항
- 온도 의존성: 온도가 변하면 저항도 변하므로 온도 보정 회로가 반드시 필요함
- 이력 현상(Hysteresis): 재질의 탄성 한계를 넘으면 원래 저항으로 돌아오지 않을 수 있음
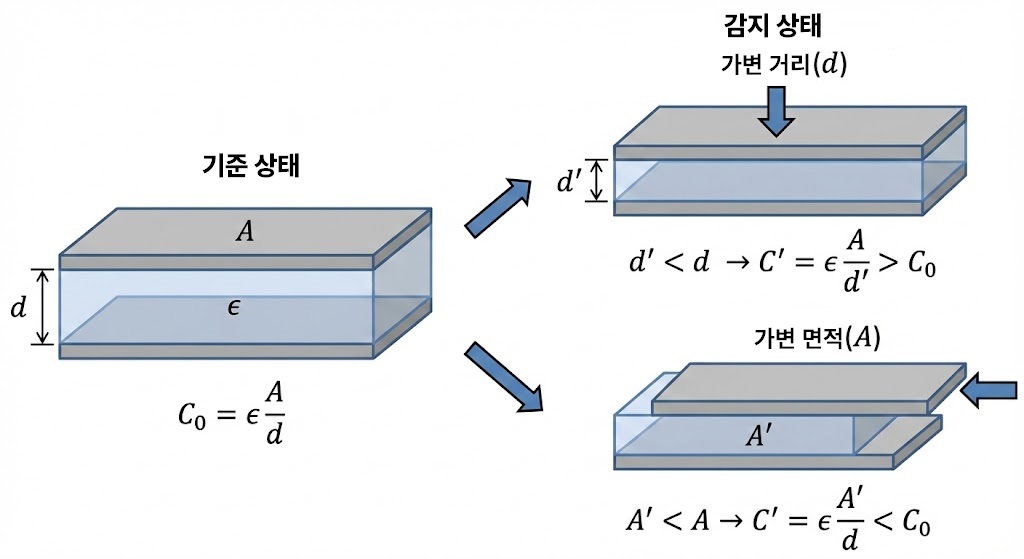
2.2 정전용량 변화 원리 (Capacitive)
- 원리
- 두 전극판 사이의 전하 저장 능력(\(C\))이 변하는 것을 이용
- 현대 MEMS 센서의 80% 이상이 채택하는 방식
- 두 전극 사이의 거리나 면적이 변할 때 저장되는 전하량(Capacitance)의 변화를 감지
- 공식 \(C = \epsilon \frac{A}{d}\)를 기초로 함
- 두 판 사이의 간격(\(d\)), 마주 보는 면적(\(A\)), 혹은 내부 물질(\(\epsilon\))이 변하면 \(C\)가 변함
- 두 전극판 사이의 전하 저장 능력(\(C\))이 변하는 것을 이용
- 프로세스
- 외부 자극(가속도, 터치, 압력) 발생
- 가동 전극(Moving Electrode)의 미세한 위치 이동
- 두 전극 사이의 간격(\(d\)) 또는 면적(\(A\)) 변화
- 정전용량 변화를 C-to-V(Capacitance to Voltage) 컨버터를 통해 전압으로 변환
- 특징
- 감도가 매우 높고 소모 전력이 극히 낮음
- 비접촉식 측정이 가능하며 열 발생이 적음
- MEMS(미세전자기계시스템) 기술에 주로 쓰임
- 가속도 센서나 터치 센서의 핵심 원리가 됨
- 주의사항
- 기생 정전용량: 센서 주변의 금속이나 배선에 의한 불필요한 \(C\)값이 노이즈로 작용함
- 고임피던스: 신호가 외부 노이즈에 취약하므로 신호 처리부(AFE)를 최대한 소자 가까이 배치해야 함
2.3 기전력 발생 원리 (Piezoelectric / Electrochemical)
- 원리
- 외부 압력을 주면 전기가 발생하거나(압전 효과), 화학 반응을 통해 직접 전류가 흐르는 원리
- 외부 전원 없이 센서 스스로 전압(\(V\))이나 전류(\(I\))를 생성하는 ‘능동형(Active)’ 메커니즘
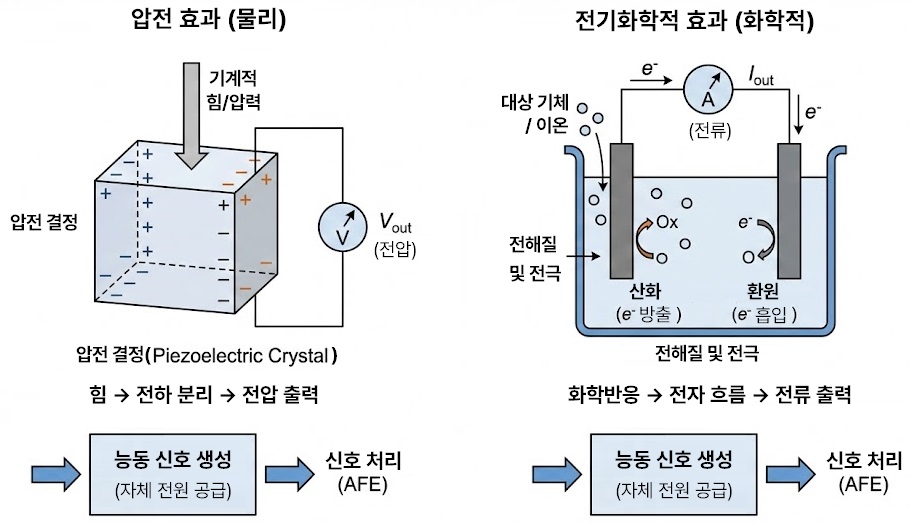
- 압전 원리 (Piezoelectric - 물리)
- 원리
- 특정 결정 구조(수정, 세라믹 등)에 압력을 가하면 ➜ 양단에 전하가 쌓이며 ➜ 전압이 발생하는 현상
- 특징
- 반응 속도가 매우 빠르고 견고함
- 주의사항
- 정적 측정 불가
- 전하가 시간이 지나면 방전되므로 ‘변화하는’ 진동이나 충격 측정에만 사용 가능함
- 원리
- 전기화학 원리 (Electrochemical - 화학)
- 원리
- 타겟 물질(가스, 이온)이 전극과 만나 산화/환원 반응을 일으킬 때 이동하는 전자의 흐름(전류)을 측정
- 특징
- 특정 물질에 대한 선택성이 매우 뛰어남
- 주의사항
- 수명 제한
- 전해질이 소모되거나 전극이 오염되므로 주기적인 교체가 필수
- 원리
2.4 메커니즘 별 비교 요약
| 구분 | 저항 변화 (Resistive) | 정전용량 (Capacitive) | 기전력 발생 (Active) |
|---|---|---|---|
| 주요 입력 | 온도, 압력, 변위 | 가속도, 터치, 근접 | 충격, 진동, 특정 가스 |
| 회로 복잡도 | 낮음 | 중간 (C-to-V 필요) | 높음 (초정밀 증폭 필요) |
| 에너지 방식 | 수동 (전원 공급 필수) | 수동 (전원 공급 필수) | 능동 (스스로 전기 발생) |
| 실무 키워드 | 휘트스톤 브리지 | MEMS, 기생 용량 | 자가 발전, 일회용(화학) |
- 저항과 정전용량은 ‘재료의 상태’가 변하는 것을 외부 전기로 알아내는 것이고,
- 기전력 방식은 센서가 ‘발전기’처럼 전기를 직접 만드는 것
3. 하드웨어 설계 시 고려해야 할 실무 포인트
- SNR (Signal-to-Noise Ratio)
- 신호 대비 잡음비
- 하드웨어 구조상 소자에서 신호를 증폭할 때 잡음도 같이 증폭되므로, 이를 어떻게 분리하느냐가 기술력의 핵심
- 임피던스 매칭 (Impedance Matching)
- 센서 소자와 신호 처리 회로 간의 전기적 흐름을 원활하게 맞추는 작업
- 이것이 맞지 않으면 신호가 왜곡되거나 손실됨
- 패키징(Packaging)
- 센서 하드웨어를 외부 환경(습기, 먼지, 충격)으로부터 보호하면서도,
- 측정 대상(공기, 액체)과는 접촉해야 하는
- 모순된 조건을 해결하는 하드웨어 외장 기술
- 센서 하드웨어는 ‘안테나(소자)’와 ‘라디오 회로(AFE/ADC)’가 합쳐진 것과 같음
- 아무리 안테나가 좋아도 라디오 회로에서 잡음을 못 걸러내면 지직거리는 소리만 들리듯,
- 센서 기술은 소자 자체의 물리적 원리와 신호 처리 회로 기술이 결합되어야 완성됨