센서의 동작 원리
1. 센서의 동작 원리
- 센서의 동작 프로세스는 단순히 ‘입력’과 ‘출력’으로 끝나는 것이 아니라,
- 물리적 세계의 아날로그 정보를 컴퓨터가 이해할 수 있는 디지털 언어로 ‘번역’하는 정교한 단계들로 구성되어 있음
1.1 센서의 기본 동작 구성
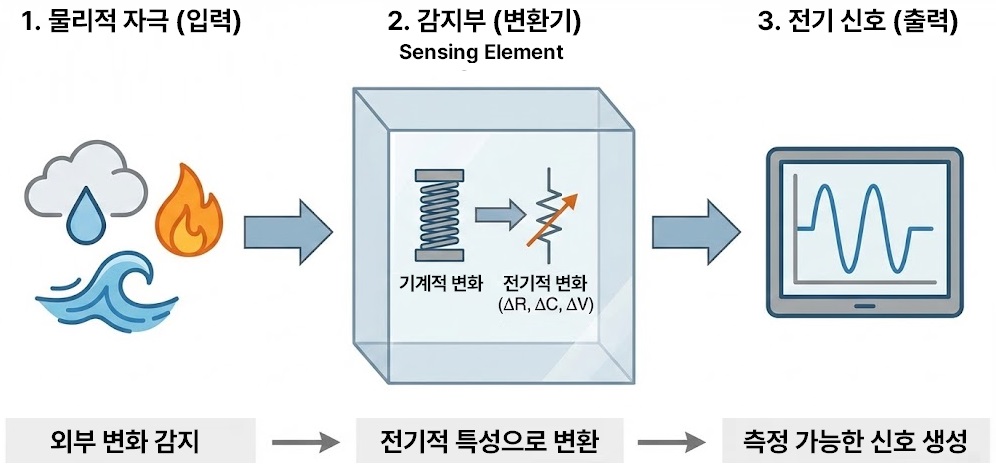
센서의 동작은 기본적으로 외부 물리량과 내부 전기적 물성값 사이의 상관관계 변화를 탐지하고 이를 해석하는 과정
센서의 핵심 구성
- 감지부(Sensing Element): 외부 자극을 실제로 감지하는 물리/화학적 소재 또는 소자
- 변환부(Transducer): 감지부에서 발생한 변화를 전기 신호(전압, 전류, 저항, 정전용량 등)로 변환
- 신호 처리부(Signal Conditioning): 신호 증폭, 필터링, 잡음 제거, 아날로그-디지털 변환을 통해 최종 출력 신호로 가공
- 앞에서 다룬 센서의 동작 원리는 센서의 ‘육체(Physical Structure)’인 하드웨어 구성을 다루었다면,
- 이번에 다룰 센서의 동작 원리는 센서가 정보를 받아들여 출력하기까지의 ‘신경계(Functional Process)’라고 할 수 있음
- 단순하게 보면,”무엇으로 구성되어 있는가(Structure)”와 “어떤 순서로 일이 일어나는가(Function)”의 차이로 볼 수 있음
- 하드웨어 구조 vs 동작 프로세스 비교
- 하드웨어 구조가 공간적인 배치를 의미한다면, 동작 원리는 에너지의 흐름을 기준으로 함
구분 하드웨어 구조 (Hardware Structure) 동작 프로세스 (Functional Block) 관점 물리적 실체 (부품, 재료, 기구부) 데이터의 흐름 (입력 → 변환 → 출력) 구성 요소 케이스, 소자(Chip), 기판(PCB), 배선 감지부, 신호 변환부, 신호 처리부 비유 카메라의 렌즈, CMOS 센서, 바디 빛 수용 → 광전 변환 → 이미지 프로세싱
1.2 센서 동작의 3단계 프로세스
1.2.1 감지부 (Sensing Element)
- “특정 에너지(열, 빛, 압력 등) 상태의 변화”를 포착하는 것
- 외부 세계의 물리적·화학적 변화를 가장 먼저 받아들이는 ‘최전방 접점’
- 피부의 촉각 세포나 눈의 망막과 같은 역할
- 감지부의 핵심 원리: ‘선택적 반응’
- 선택성(Selectivity)
감지부는 주변의 수많은 정보 중 자신이 설계된 특정 자극에만 반응하도록 만들어짐
- 물리적 변형: 압력을 받으면 휘어지는 막(Diaphragm)이나 길어지는 금속선(Strain Gauge)
- 열적 특성: 온도가 올라가면 저항이 커지거나 작아지는 반도체 물질(Thermistor)
- 화학적 결합: 특정 가스 분자가 달라붙으면 성질이 변하는 산화물 층
- 선택성(Selectivity)
- 감지 방식에 따른 분류
- 직접 감지 (Direct Sensing)
- 중간 단계 없이 자극이 감지부의 물리적 성질을 즉각적으로 바꾸는 방식
- 예시: 열전대(Thermocouple)
- 두 금속 접점은 온도 차이가 생기면 즉시 전압을 발생
- 접점 자체가 감지부이자 변환부가 됨
- 간접 감지 (Indirect Sensing)
- 자극을 다른 물리량으로 먼저 바꾼 뒤 측정하는 방식
- 예시: 초음파 거리 센서
- 초음파가 물체에 맞고 돌아오는 ‘시간(Time)’을 감지
- 실제 거리를 직접 만져보는 것이 아니라 시간이라는 매개체를 통해 감지하는 것
- 직접 감지 (Direct Sensing)
- 감지부 설계 시 고려되는 주요 특성
- 엔지니어가 센서를 선택하거나 설계할 때 감지부에서 가장 중요하게 보는 요소들
- 민감도 (Sensitivity):
- 외부 자극이 아주 조금 변했을 때 감지부가 얼마나 크게 반응하는가?
- 선형성 (Linearity):
- 자극이 2배 커졌을 때 감지부의 변화도 일정하게 2배가 되는가?
- 데이터 처리가 쉬워짐
- 응답 속도 (Response Time):
- 자극이 발생한 후 감지부가 변화를 완료할 때까지 시간이 얼마나 걸리는가?
- 내구성 (Durability):
- 반복되는 자극이나 가혹한 환경(고온, 부식성 가스 등)에서 감지 물질이 변질되지 않는가?
- 민감도 (Sensitivity):
- 엔지니어가 센서를 선택하거나 설계할 때 감지부에서 가장 중요하게 보는 요소들
- 실전 사례: 스마트 팩토리의 감지부
- 컨베이어 벨트 위의 물체 감지
- 적외선 센서의 감지부는 ‘광다이오드’
- 물체에 반사되어 돌아오는 빛의 양이 변하는 것을 감지함
- 모터의 진동 감지
- 가속도 센서 내부의 ‘미세 질량체(Proof Mass)’가 감지부
- 진동이 발생하면 이 질량체가 미세하게 움직이며 정전용량을 변화시킴
- 컨베이어 벨트 위의 물체 감지
- 특징
- 이 단계에서는 아직 전기 신호가 아닐 수도 있음
- 예시:
- 온도에 의해 금속이 팽창하거나(바이메탈),
- 압력에 의해 막이 휘어지는(다이아프램)
- 물리적 변위 자체가 감지의 결과
- 감지부는 ‘현상’을 ‘물리적 변화’로 고정하는 단계
- 이 단계에서 변화가 정확하게 일어나지 않으면 뒤에 아무리 좋은 신호 처리 프로세서를 달아도 무용지물이 됨
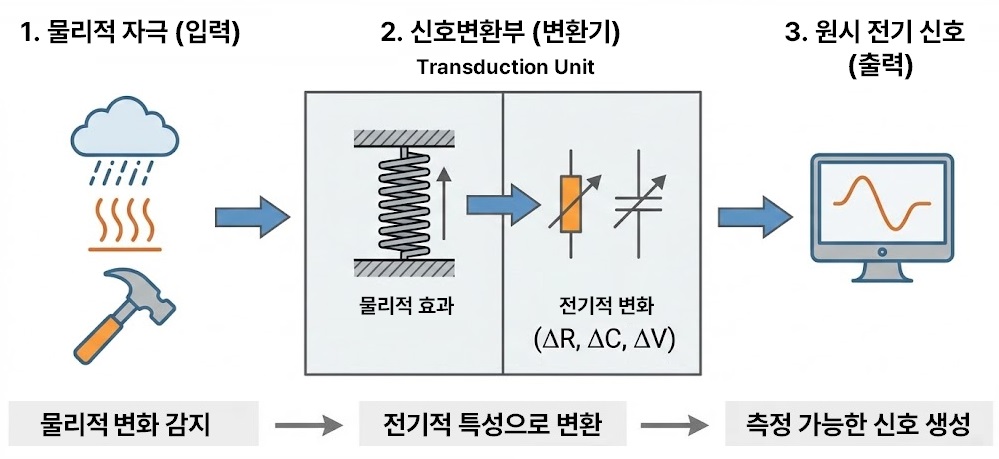
1.2.2 신호 변환부 (Transduction Unit)
- 감지부가 포착한 비전기적인 ‘현상’을 우리가 측정하고 계산할 수 있는 ‘전기적 신호’로 실질적으로 바꾸는 에너지 변환의 핵심
- (물리적 변위 → 저항값 변화) 또는 (빛 에너지 → 전압) 등으로 에너지의 형태를 전환
- 감지부가 “무언가 변했다”는 것을 느끼는 ‘피부’라면,
- 신호 변환부는 그 변화를 전기적 신호로 바꿔 신경망에 태우는 ‘수용체’의 역할
- 신호 변환의 핵심 원리: 에너지 변환 (Energy Conversion)
- 신호 변환부는 다양한 물리 법칙을 이용하여 입력 에너지를 전기 에너지로 전환함
- 대표적으로 쓰이는 물리적 현상들
- 저항 변화 (Resistive):
- 물리적 변형이나 온도에 따라 물질의 저항값이 달라지는 원리
- 예: 스트레인 게이지, 서미스터
- 용량 변화 (Capacitive):
- 두 전극 사이의 거리나 유전체가 변할 때 전하를 저장하는 능력인 정전용량이 변하는 원리
- 예: 터치스크린, 압력 센서
- 기전력 발생 (Generative/Active):
- 외부 에너지에 의해 스스로 전압을 만들어내는 원리
- 압전 효과 (Piezoelectric):
- 수정 등에 압력을 가하면 전기가 발생하는 현상
- 광전 효과 (Photoelectric):
- 빛을 받으면 전자가 튀어나와 전류가 흐르는 현상
- 열전 효과 (Seebeck Effect):
- 서로 다른 금속의 온도 차이에 의해 전압이 생기는 현상
- 저항 변화 (Resistive):
- 신호 변환부는 다양한 물리 법칙을 이용하여 입력 에너지를 전기 에너지로 전환함
- 신호 변환부의 하드웨어적 실체: 트랜스듀서 (Transducer)
- 흔히 센서와 트랜스듀서를 혼용해서 부르기도 함
- 엄밀히 말하면 트랜스듀서는 신호 변환 기능을 수행하는 소자 그 자체를 의미함
- 입력 에너지: 빛, 열, 소리, 압력, 자기장 등
- 출력 신호: 전압(), 전류(), 저항(), 주파수() 등
- 예시: 마이크로폰
- 소리의 진동(공기 압력)을 감지부인 진동판이 받아들이고,
- 이를 신호 변환부(코일과 자석 또는 정전용량 방식)가 전기 신호로 바꿈으로써 작동하는
- 대표적인 트랜스듀서
- 변환 과정에서의 성능 결정 요인
신호 변환부가 얼마나 정교하게 만들어졌느냐가 센서 전체의 성능을 결정함
- 변환 효율 (Efficiency):
- 입력 에너지 대비 얼마나 뚜렷한 전기 신호를 만들어내는가?
- 분해능 (Resolution):
- 입력의 아주 미세한 변화를 전기 신호의 변화로 구별해낼 수 있는가?
- 히스테리시스 (Hysteresis):
- 입력이 증가할 때와 감소할 때, 동일한 입력값에서 같은 전기 신호를 출력하는가?
- 이 오차가 작아야 좋은 센서임
- 변환 효율 (Efficiency):
- 실전 사례: 스마트 팩토리와 로보틱스
- 물리 AI나 로봇 제어 관점에서 신호 변환부는 매우 중요
- 로봇 팔의 토크(힘) 제어:
- 로봇 관절에 가해지는 힘을 스트레인 게이지라는 변환부가 저항 변화로 바꿈
- 이 저항값이 변하는 것을 읽어 로봇이 물체를 얼마나 세게 쥐고 있는지 판단
- 자율주행차의 LiDAR:
- 레이저 빛이 물체에 맞고 돌아오는 광학 에너지를
- APD(Avalanche Photodiode)라는 변환부가 매우 빠른 전기 펄스로 바꿈
- 로봇 팔의 토크(힘) 제어:
- 물리 AI나 로봇 제어 관점에서 신호 변환부는 매우 중요
- 감지부가 “무엇(What)”을 느끼는가에 집중한다면,
- 신호 변환부는 그것을 “어떻게 전기로 번역(How to Translate)”할 것인가를 담당함
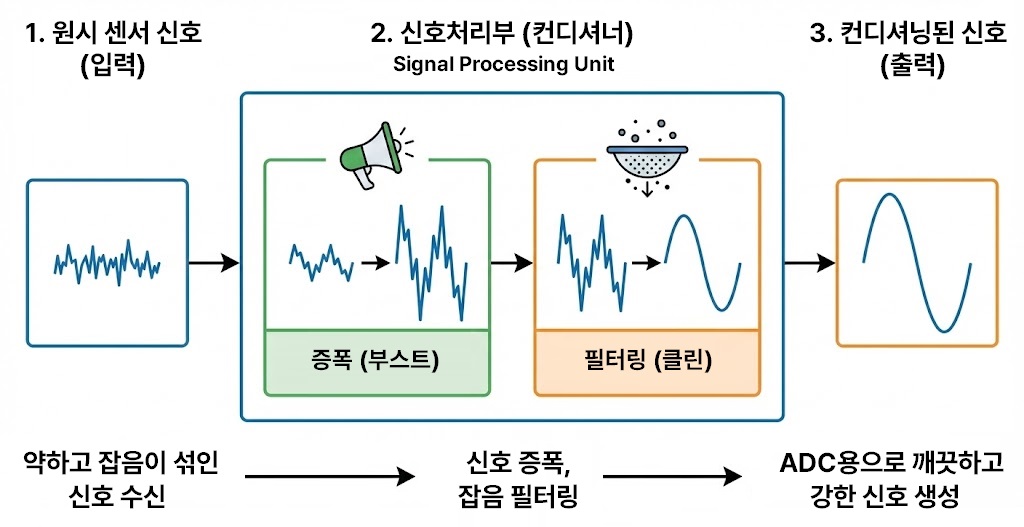
1.2.3 신호 처리부 (Signal Processing)
- 신호 변환부에서 만들어진 전기 신호는 보통 너무 작거나 노이즈가 섞여 있어 바로 사용할 수 없음
- 신호 변환부가 세상의 물리적 변화를 겨우 ‘전기 신호’로 바꾸어 놓았다면,
- 신호 처리부(Signal Processing)는 그 가공되지 않은(Raw) 신호를
- 컴퓨터나 MCU(Raspberry Pi, Jetson Nano 등)가 이해할 수 있는 깨끗한 디지털 데이터로 정제하는 공장의 역할
- ‘신호 컨디셔닝(Signal Conditioning)’이라고도 부름
신호 처리부의 주요 공정
- 증폭 (Amplification)
- 신호 변환부에서 갓 나온 전기 신호는 보통 수 mV(밀리볼트) 수준으로 매우 미약함
- 이를 그대로 전송하면 노이즈에 묻혀버리기 때문에,
사용하기 적절한 전압 범위(예: 0~5V)로 키워주는 과정
- 핵심 부품:
- Op-Amp (연산 증폭기)가 역할을 수행
- 필터링 (Filtering)
- 세상에는 우리가 원하는 신호 외에도 수많은 ‘전기적 잡음(Noise)’이 존재함
60Hz 전원 노이즈나 고주파 간섭을 제거하고 순수한 센서 신호만 걸러냄
- 핵심 부품:
- 저주파 통과 필터(LPF):
- 급격하게 튀는 고주파 노이즈를 깎아내고 부드러운 신호만 남김
- 저주파 통과 필터(LPF):
- 선형화 (Linearization)
- 많은 센서의 출력은 입력에 비례하지 않고 곡선 형태(비선형)를 띰
- 예:
- 온도가 2배 올랐는데 저항은 1.5배만 변할 수 있음
- 이를 소프트웨어나 하드웨어적으로 보정하여 “입력과 출력이 직선 관계”가 되도록 만듦
- 아날로그-디지털 변환 (ADC, Analog-to-Digital Conversion)
- 가장 중요한 단계
연속적인 전압 신호(아날로그)를 컴퓨터가 처리할 수 있는 숫자 값(0, 1)으로 바꿈
- 분해능(Resolution):
- 8-bit(256단계), 12-bit(4096단계) 등 비트 수가 높을수록 신호를 더 촘촘하고 정확하게 숫자로 표현할 수 있음
- 증폭 (Amplification)
- 하드웨어적 구현: 모듈형 vs 통합형
직접 회로를 설계하거나 기성 센서를 구매하실 때 이 차이를 확인
- 모듈형 (Analog Output):
- 증폭과 필터링만 거친 전압을 그대로 내보냄
- 사용자가 직접 라즈베리파이 등에 별도의 ADC 칩(MCP3008 등)을 달아서 읽어야 함
- 통합형 (Digital Output):
- 센서 패키지 안에 ADC와 통신 인터페이스(I2C, SPI)가 모두 들어 있음
- “온도는 25.5도다”라는 결과값(Data)을 디지털 통신으로 바로 쏴주므로 사용하기 매우 편리함
- 스마트 팩토리 및 AI 에이전트에서의 역할
- 스마트 팩토리, AI 에이전트 등의 관점에서 신호 처리부는 단순한 회로 그 이상의 의미를 가짐
- 데이터 신뢰성:
- 신호 처리부에서 노이즈를 잘 걸러내지 못하면,
- AI 에이전트는 잘못된 데이터를 기반으로 잘못된 판단을 내리게 됨
- (Garbage In, Garbage Out)
- 엣지 컴퓨팅:
- 최근에는 센서의 신호 처리부 단계에서 간단한 AI 추론(TinyML)을 수행하여, 중요한 이벤트만 중앙 서버로 보내는 방식이 선호됨
- 데이터 신뢰성:
- 스마트 팩토리, AI 에이전트 등의 관점에서 신호 처리부는 단순한 회로 그 이상의 의미를 가짐
- 신호 처리부는 “작고 지저분한 전기 신호를 크고 깨끗한 디지털 숫자로 만드는 필터이자 번역기”