1. GPIO 개요
- GPIO(General Purpose Input/Output)
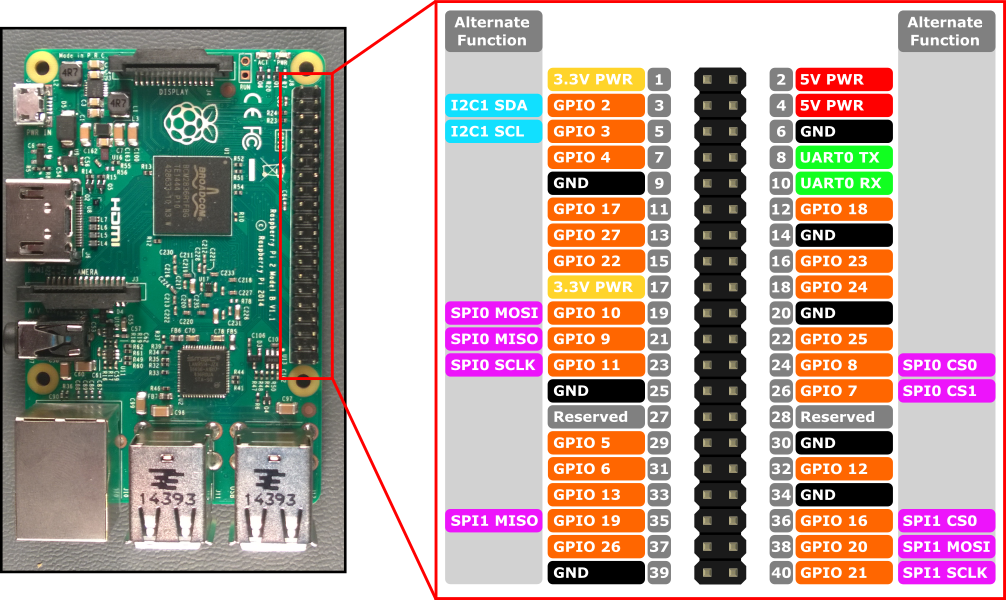
- 라즈베리파이 model A/B를 제외하고 모든 모델은 40핀 규격을 사용함
라즈베리파이 Pin Out (40핀)
2. LED로 전조등 구현하기
- 전조등 LED 제어용 GPIO 핀
- 전방 좌측: 26
- 전방 우측: 16
- 후방 좌측: 21
- 후방 우측: 20
#//file: "control_LED.py"
from gpiozero import LED
import time
led1 = LED(26)
led2 = LED(16)
led3 = LED(20)
led4 = LED(21)
try:
while True:
led1.on()
led2.on()
led3.on()
led4.on()
time.sleep(1.0)
led1.off()
led2.off()
led3.off()
led4.off()
time.sleep(1.0)
except KeyboardInterrupt:
pass
led1.off()
led2.off()
led3.off()
led4.off()
3. 버튼 입력받기
#//file: "input_Button.py"
from gpiozero import Button
import time
SW1 = Button(5, pull_up=False )
SW2 = Button(6, pull_up=False )
SW3 = Button(13, pull_up=False )
SW4 = Button(19, pull_up=False )
oldSw = [0,0,0,0]
newSw = [0,0,0,0]
cnt = [0,0,0,0]
try:
while True:
newSw[0] = SW1.is_pressed
if newSw[0] != oldSw[0]:
oldSw[0] = newSw[0]
if newSw[0] == 1:
cnt[0] = cnt[0] + 1
print("SW1 click",cnt[0])
time.sleep(0.2)
newSw[1] = SW2.is_pressed
if newSw[1] != oldSw[1]:
oldSw[1] = newSw[1]
if newSw[1] == 1:
cnt[1] = cnt[1] + 1
print("SW2 click",cnt[1])
time.sleep(0.2)
newSw[2] = SW3.is_pressed
if newSw[2] != oldSw[2]:
oldSw[2] = newSw[2]
if newSw[2] == 1:
cnt[2] = cnt[2] + 1
print("SW3 click",cnt[2])
time.sleep(0.2)
newSw[3] = SW4.is_pressed
if newSw[3] != oldSw[3]:
oldSw[3] = newSw[3]
if newSw[3] == 1:
cnt[3] = cnt[3] + 1
print("SW4 click",cnt[3])
time.sleep(0.2)
except KeyboardInterrupt:
pass
4. 부저로 경적기능 구현하기
#//file: "control_Buzzer.py"
from gpiozero import TonalBuzzer,Button
import time
BUZZER = TonalBuzzer(12)
SW1 = Button(5, pull_up=False )
SW2 = Button(6, pull_up=False )
SW3 = Button(13, pull_up=False )
SW4 = Button(19, pull_up=False )
try:
while True:
if SW1.is_pressed == True:
BUZZER.play(261)
elif SW2.is_pressed == True:
BUZZER.play(293)
elif SW3.is_pressed == True:
BUZZER.play(329)
elif SW4.is_pressed == True:
BUZZER.play(349)
else:
BUZZER.stop()
except KeyboardInterrupt:
pass
BUZZER.stop()
5. 모터를 구동하여 자동차 움직이기
#//file: "control_Motor.py"
from gpiozero import DigitalOutputDevice
from gpiozero import PWMOutputDevice
import time
PWMA = PWMOutputDevice(18)
AIN1 = DigitalOutputDevice(22)
AIN2 = DigitalOutputDevice(27)
PWMB = PWMOutputDevice(23)
BIN1 = DigitalOutputDevice(25)
BIN2 = DigitalOutputDevice(24)
try:
while True:
AIN1.value = 0
AIN2.value = 1
PWMA.value = 0.5 # 0.0~1.0 speed
BIN1.value = 0
BIN2.value = 1
PWMB.value = 0.5 # 0.0~1.0 speed
time.sleep(1.0)
AIN1.value = 0
AIN2.value = 1
PWMA.value = 0.0 # 0.0~1.0 speed
BIN1.value = 0
BIN2.value = 1
PWMB.value = 0.0 # 0.0~1.0 speed
time.sleep(1.0)
except KeyboardInterrupt:
pass
PWMA.value = 0.0
PWMB.value = 0.0
6. 스위치를 입력받아 자동차 조종해보기
#//file: "sw_control_Car.py"
from gpiozero import Button
from gpiozero import DigitalOutputDevice
from gpiozero import PWMOutputDevice
import time
SW1 = Button(5, pull_up=False )
SW2 = Button(6, pull_up=False )
SW3 = Button(13, pull_up=False )
SW4 = Button(19, pull_up=False )
PWMA = PWMOutputDevice(18)
AIN1 = DigitalOutputDevice(22)
AIN2 = DigitalOutputDevice(27)
PWMB = PWMOutputDevice(23)
BIN1 = DigitalOutputDevice(25)
BIN2 = DigitalOutputDevice(24)
def motor_go(speed):
AIN1.value = 0
AIN2.value = 1
PWMA.value = speed
BIN1.value = 0
BIN2.value = 1
PWMB.value = speed
def motor_back(speed):
AIN1.value = 1
AIN2.value = 0
PWMA.value = speed
BIN1.value = 1
BIN2.value = 0
PWMB.value = speed
def motor_left(speed):
AIN1.value = 1
AIN2.value = 0
PWMA.value = speed
BIN1.value = 0
BIN2.value = 1
PWMB.value = speed
def motor_right(speed):
AIN1.value = 0
AIN2.value = 1
PWMA.value = speed
BIN1.value = 1
BIN2.value = 0
PWMB.value = speed
def motor_stop():
AIN1.value = 0
AIN2.value = 1
PWMA.value = 0.0
BIN1.value = 0
BIN2.value = 1
PWMB.value = 0.0
try:
while True:
if SW1.is_pressed == True:
print("go")
motor_go(0.5)
elif SW2.is_pressed == True:
print("right")
motor_right(0.5)
elif SW3.is_pressed == True:
print("left")
motor_left(0.5)
elif SW4.is_pressed == True:
print("back")
motor_back(0.5)
else:
print("stop")
motor_stop()
time.sleep(0.1)
except KeyboardInterrupt:
pass
PWMA.value = 0.0
PWMB.value = 0.0